Конструкционные отличия синхронного и асинхронного двигателя
Содержание:
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
https://youtube.com/watch?v=hU9krurbi0c
Синхронные двигатели: устройство и принцип действия
Основные части синхронного двигателя – это якорь (статор, неподвижная часть) и индуктор (ротор), разделенные воздушной прослойкой. В пазы статора закладывают трехфазную распределенную обмотку – обычно она соединяется «звездой».
Рис. 2 Схема синхронного двигателя
С началом работы двигателя тока, подаваемые в якорь, создают вращение магнитного поля, которое пересекает поле индуктора, что в результате взаимодействия двух полей переходит в энергию. Поле якоря чаще называют иначе – поле реакции якоря. В генераторах такое получают при помощи индуктора. Входящие в состав индуктора электромагниты постоянного тока принято называть полюсами. При этом индукторы во всех синхронных двигателях могут исполняться по двум схемам – явнополюсной и неявнополюсной, различающиеся между собой расположением полюсов. Чтобы уменьшить значение магнитного сопротивления и тем самым улучшить условия для прохождения магнитного потока, применяют ферромагнитные сердечники. Они располагаются в статоре и роторе, для их изготовления используют специальную марку стали – электротехническую, отличающую высоким содержанием кремния – это позволяет уменьшить вихревые токи и повысить электрическое сопротивление стали.
Рис. 3. Магнитные поля в синхронном двигателе
В основу работы синхронного двигателя положен принцип взаимного влияния полюсов индуктора и магнитного поля, индуцируемого якорем. При запуске осуществляется разгон двигателя до частоты, которая близка по своему значению частоте, с которой происходит в зазоре вращение магнитного поля. Только при выполнении этого условия двигатель переходит в функционирование в синхронном режиме. В данный момент пересекаются магнитные поля, инициируемые индуктором и ротором. Этот момент в технической литературе принято называть входом в синхронизацию.
Работа синхронного двигателя наглядно представлена на видео:
Длительное время в качестве разгонного двигателя использовался стандартный синхронный двигатель, который был механически соединен с синхронным. Благодаря этому, ротор на синхронном двигателе механически разгонялся до подсинхронной скорости, а затем уже самостоятельно, за счет взаимодействия электромагнитных полей, втягивался в синхронизм. Обычно при подборе мощности пускового двигателя исходили из соотношения 10-15% от номинальной мощности разгоняемого двигателя. Такого запаса мощности вполне хватало запустить синхронный двигатель не только в холостую, но даже и при незначительной нагрузке на валу.
Рис. 4 Синхронный двигатель (1) с внешним разгонным (2) двигателем
Такой способ разгона усложняет и существенно удорожает общую стоимость, поэтому в современных двигателях от него отказались в пользу разгона в состоянии асинхронного режима. В этом случае с помощью реостата (короткозамкнутым путем) обмотки индуктора замыкают, как в асинхронном двигателе. Чтобы провести запуск двигателя в таком режиме, на ротор устанавливают короткозамкнутую обмотку, выступающую одновременно и как успокоительная обмотка, устраняющая во время проведения синхронизации раскачивание ротора. В момент, когда скорость вращения достигнет требуемого номинального значения, в индуктор будет подан постоянный ток. Но для двигателей, в которых стоят постоянные магниты, все равно придется для разгона использовать внешние двигатели.
В криогенных синхронных машинах используется так называемая обращенная конструкция, при которой размещение индуктора и якоря выполнено наоборот, т.е. индуктор расположен на статоре, а якорь – на роторе. В таких машинах обмотки возбуждения состоят из материалов, обладающими свойствами сверхпроводимости.
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Система управления

Если электромеханическая часть состоит преимущественно из трех компонентов, в числе которых ротор, статор и несущая конструкция в виде корпуса, то управляющая инфраструктура более сегментирована – количество элементов может достигать нескольких десятков. Другое дело, что их можно поделить на виды. В единственном числе будет представлен только инвертор. Он отвечает за функции коммутации, осуществляя подключение и переключение фаз. Основные же задачи контроля с подачей сигналов выполняют датчики. Главным из них является детектор положения ротора. Кроме этого, в состав управляющего блока вводится и система регуляции сигналов. Это узел с ключами, посредством которого реализуется связь датчиков и электромеханической начинки.
Информацию о позиции ротора обрабатывает микропроцессор. Внешне интерфейс этого блока представляет собой панель управления. На приеме она работает с сигналами широтно-импульсной модуляции (ШИМ-сигнал). Если предусматривается подача низковольтных сигналов, то в управляющем блоке устанавливается и транзисторный мост. Он преобразует сигнал в силовое напряжение, которое в дальнейшем подается на электродвигатель. Наличие датчиков с системой обработки импульсов как раз и отличает управление вентильным двигателем от средств контроля щеточно-коллекторных агрегатов. Другое дело, что возможность внедрения электронной аппаратуры с датчиками допускается и в коллекторных машинах наряду с механическими системами управления.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
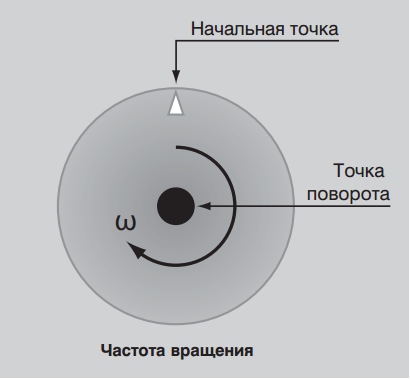
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
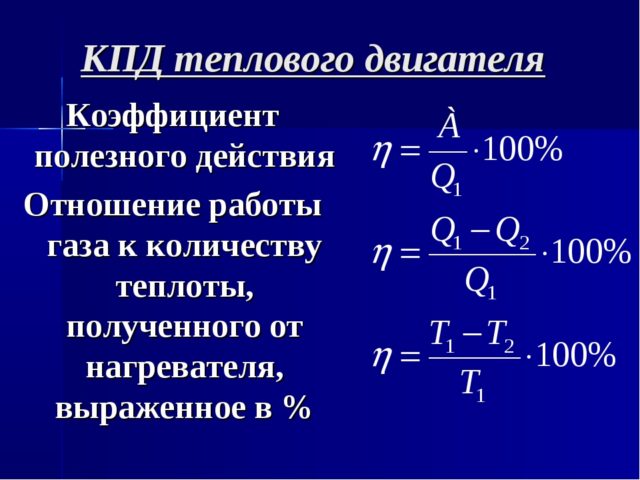
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
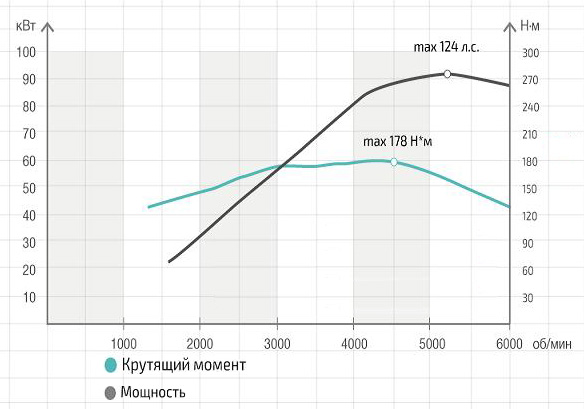
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей – в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.

Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Запуск установки
При использовании синхронных двигателей возникает масса трудностей на этапе их запуска. Из-за этого они не пользуются особой популярностью и уступают асинхронным вариантам.
С момента появления на рынке работа синхронных агрегатов обеспечивалась специальным асинхронником, который механически соединялся с остальными узлами. По сути, ротор разгонялся до нужной частоты с помощью второго типа моторов. Современные асинхронники не нуждаются в подключении дополнительных механизмов, и все, что требуется для их работы, — соответствующее напряжение для статорной обмотки.
Как только система обеспечит нужную скорость вращения, разгонный двигатель будет отключен. При этом магнитные поля из электрического мотора выведут его на работу в синхронном режиме. Чтобы разогнать установку, придется задействовать еще один мотор мощностью 10% от мощности синхронного двигателя. При разгоне электродвигателя на 1 кВт используют разгонную систему мощностью 100 Вт. Как утверждают специалисты, таких показателей вполне хватает для сбалансированной работы машины в холостом режиме или с небольшой нагрузкой.
Отличие в характеристиках электродвигателей
Конструктивные особенности и рабочие характеристики электродвигателей имеют решающее значение при выборе агрегатов. От этого зависит проектирование трансмиссий и всех силовых узлов механизмов. При выборе двигателя нужно опираться на общность и главные отличия в свойствах машин:
- Главное отличие синхронного от асинхронного двигателя заключается в конструкции ротора. Он представляет собой постоянный или электрический магнит. У асинхронника магнитные поля в роторе наводятся с помощью электромагнитной индукции.
- У синхронных двигателей частота вращения вала постоянна, у асинхронников она может изменяться при изменении нагрузки.
- У синхронников отсутствует пусковой момент. Для входа в синхронизацию требуется применять асинхронный пуск.
Синхронный и асинхронный электродвигатели находят каждый своё применение. Синхронные двигатели рекомендуется использовать везде при высоких мощностях, где присутствует непрерывный производственный процесс и не нужно часто перезапускать агрегаты или регулировать частоту вращения. Они используются в конвейерах, прокатных станах, компрессорах, камнедробилках и т. д. Современный синхронный электродвигатель имеет такой же быстрый запуск, как и асинхронный, но он меньше и экономичнее, чем асинхронный, равный по мощности.
Асинхронные электродвигатели с фазным ротором применяются там, где нужен большой пусковой момент и частые остановки агрегатов. Например, в лифтах и башенных кранах. Асинхронные электродвигатели с короткозамкнутым ротором получили широкое применение из-за простоты устройства и удобства в эксплуатации.
Используя достоинства разных агрегатов и то, чем отличается синхронный двигатель от асинхронного, можно делать обоснованный выбор того или иного мотора при проектировании машин, станков и другого оборудования.
Синхронный и асинхронный двигатель: отличия
Отличие работы двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните. Благодаря притягиванию разноименных полюсов вращающееся поле статора влечет и магнитный ротор. Их скорость получается одинаковой. Отсюда и название — синхронный.

В нем можно добиться, в отличие от асинхронного, даже опережения напряжения по фазам. Тогда устройство, подобно батареям конденсатора, может применяться для увеличения мощности.
Асинхронные двигатели, в свою очередь, просты и надежны, но их недостатком является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя (то есть изменения направления его вращения в противоположную сторону) меняют расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Если рассматривать частоту вращения, то имеют и здесь синхронный и асинхронный двигатель отличия. В синхронном типе этот показатель является постоянным, в отличие от асинхронного. Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах.
Выявить на том или ином устройстве наличие рассматриваемых типов приборов очень просто. На асинхронном двигателе будет не круглое число оборотов (например, девятьсот тридцать в минуту), в то время как на синхронном — круглое (например, тысяча оборотов в минуту).
И те, и другие моторы управляются достаточно сложно. Синхронный тип имеет жесткую характеристику механики: при любой меняющейся нагрузке на вал мотора частота вращения будет одной и той же. При этом нагрузка, конечно, должна меняться с учетом того, чтобы двигатель способен ее выдержать, иначе это приведет к поломке механизма.

Так устроен синхронный и асинхронный двигатель. Отличия обоих видов обуславливают сферу их использования, когда один вид справляется с задачей оптимальным образом, для другого это будет проблематичным. В то же время можно встретить и комбинированные механизмы.
Принцип работы
Вентильный электродвигатель в процессе работы создает индукцию магнитных полюсов через ротор. На фоне генерации электромагнитного воздействия формируется сопротивление. Иными словами, активизируется функция ротора, после чего он передает крутящий момент целевому агрегату. В условиях переменной скорости магнетизм может быть оптимизирован для более производительной работы с реверсом. Опять же, датчик положения ротора сообщает данные для регуляции в соответствии с фазами напряжения. Гибкость и оперативность настройки параметров ротора и количества фаз позволяет эффективнее регулировать работу механизма. Весь цикл демонстрирует процесс преобразования электроэнергии в физическую мощь (механическая энергия), которую вырабатывает генератор. Причем если резко отсоединить агрегат от сети, то преобразуемая в данный момент энергия будет возвращена статору.

Важным условием поддержания достаточной производительности является стабильность двигателя. Критерием оценки этой характеристики будет его плавность, достигаемая понижением пульсаций. Для этого нужно знать вектор вращения потока статора, чтобы он был синхронен с функцией ротора. Координация разных потоков вращения как раз и достигается взаимодействием датчиков и коммутатора, которым управляются вентильные двигатели. Принцип работы этой связки позволяет с высокой точностью определять, к какой фазе нужно подключать ротор, определяя также оси. В нужной последовательности панель управления через микропроцессор попеременно подключает и отключает разные фазы.
Принцип работы
Для получения направления вращения статор двигателя должен содержать как минимум две катушки. Только в такой конструкции можно создать направленное перемещение магнитного поля. Это определяет устройство и принцип работы многих электродвигателей, питаемых от сети. Для нормальной работы синхронной машины, если это генератор, статор может содержать только одну катушку и быть источником ЭДС. Его ротор вращается принудительно. При этом, независимо от направления вращения, на клеммах статора появится переменное напряжение.
Но если такой генератор используется как двигатель, направление вращения его ротора может быть в обе стороны.
Оно будет определяться
- либо положением ротора в момент подачи напряжения на клеммы статора;
- либо принудительно направлением стартового вращения.
Конструкцию большинства электрических машин в основном определяет система электроснабжения, с которой они связаны. В наши дни первичными источниками ЭДС являются трехфазные генераторы. Эти машины создают трехфазное напряжение. Оно позволяет непосредственно получать перемещающееся магнитное поле. Без него синхронные двигатели переменного тока не могут работать, так же, как и асинхронные движки.
Для этого используются три или две фазы, питающие обмотки статора движка. Устройство синхронного двигателя должно соответствовать схеме электропитания. Наилучший результат получается при трехфазной конструкции статора. В этом случае магнитное поле получается вращающимся. По этой причине трехфазный синхронный двигатель является наиболее эффективным, если его сравнивать с аналогами, но при меньшем числе фаз.